Welcome to SIASUN !





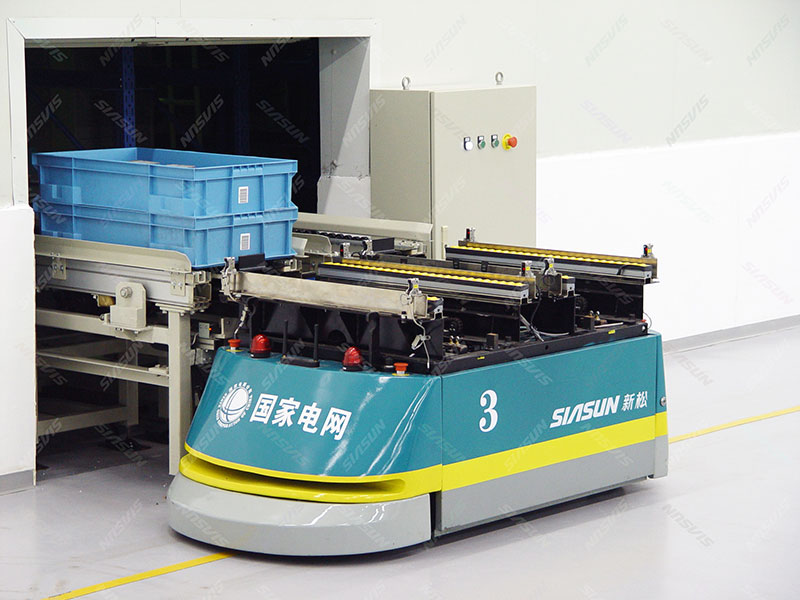
电表箱推挽移载搬运型移动机器人(AGV)是新松公司根据电表测试车间物料输送的实际要求而开发设计的系列产品。其运行控制采用新松标准的移动机器人控制模式,驱动方式双轮差动实现机器人的前进、后退、转弯运行,导航方式采用磁导航,根据生产工艺规划分为单叉和双叉两种产品。